

For a while now, we had been motivated to purchase a new UAV to replace our ageing DJI Matrice 200 (with nearly 150 hours on it). We needed something versatile, something that was able to take multiple payloads, it needed to have VTOL (vertical take-off and landing) capability, but most importantly it had to have PPK GPS so we could use it to carry our accurate aerial surveying and mapping.
With all these requirements, the choice was limited to a selection of just one – the Quantum Systems Trinity F90+. Following a successful trial survey of a 550Ha block using a Trinity F90+ owned by GCH UAV, the decision was made to purchase one for ourselves.

The Trinity F90+ combines the best attributes of fixed wing and multirotor aircraft. Utilising vertical takeoff and landing (VTOL) technology allows for take-off and landing from confined areas, while the fixed wing cruise mode gives long flight times which enables us to cover large areas – up to 20x more per flight compared to a conventional multirotor. This means we can map with higher resolution and better accuracy in less time than we could before.
This UAV is a proper professional tool. Out of the box, the specs are:
- 42MP Sony RXIRII full frame DSLR camera giving a resolution of 1.5cm @ 120m flight altitude,
- 90min + (!) flight time allowing us to easily map 600Ha in a single day,
- PPK GPS including a base station (though we recommend using your own gear if you are a surveyor) which allows for absolute accuracy of sub 50mm,
- Fully integrated mission control software including flight controller with ADS-B capability.
And how could we not love the vertical take-off feature?!
To showcase (and prove) this new UAV, we decided to 3D model the Sleeping Giant / Te Mata Peak. The secondary aim of this survey was to follow up our Cape Kidnappers project (click here) by modelling another of Hawkes Bays iconic features.
As well as being one of the main features on the Hawkes Bay landscape, Te Mata Peak also holds significant cultural meaning for Māori. The legend of Te Mata is described below.
Many centuries ago the people living in pa (fortified villages) on the Heretaunga Plains were under constant threat of war from the coastal tribes of Waimarama. At a gathering at Pakipaki (5km south of Hastings) to discuss the problem, the solution came when a kuia (wise old woman) sought permission to speak in the marae: “He ai na te wahine, ka horahia te po,” she said. (The ways of a woman can sometimes overcome the effects of darkness).
Hinerakau, the beautiful daughter of a Pakipaki chief, was to be the focal point of a plan. She would get the leader of the Waimarama tribes, a giant named Te Mata, to fall in love with her, turning his thoughts from war to peace. The plan succeeded but she too fell in love.
The people of Heretaunga, however, had not forgotten the past and with revenge the motive, demanded that Hinerakau make Te Mata prove his devotion by performing seemingly impossible tasks. The last task was to bite his way through the hills between the coast and the plains so that people could come and go with greater ease. Te Mata died proving his love when he choked on the earth of Te Mata Peak and today his half-accomplished work can be seen in the hills in what is known as The Gap or Pari Karangaranga (echoing cliffs). His prostrate body forms Te Mata Peak.
At sunset one can often see, in the mists which stretch from the crown of Kahurānaki, the beautiful blue cloak with which the grieving Hinerakau covered the body of her husband before leaping to her own death from the precipice on the Waimarama side of the Peak. The gully at the base of the cliff was formed when her body struck the earth.
Looking towards the Peak from Hastings, the huge bite that choked Te Mata can be seen. The outline of his body forms the skyline, with his head to the south and his feet to the north. European settlers also thought the hills resembled a man lying down and called him the “Sleeping Giant”.

The Sleeping Giant – Te Mata
Upon hearing that the peak would be shut down for a day to allow for power pole renewal, we seized the opportunity to get exclusive access to carry out this project.
A number of permissions needed to be gained before arriving on site. These are things we would normally arrange for any aerial survey, however a low flying helicopter working for the lines company gave us a bit of a curveball to deal with. In total, we needed to ensure:
- Permission gained from households beneath the flight path – done by letterbox drop and doorknocking.
- Permission gained from Te Mata Park trust
- Permission gained from HDC (via annual generic traffic management plan and UAV application)
- The flight was logged in Airshare
- A NOTAM was issued for flight (due to altitude flown).
- The UAV flight had a large enough separation zone from the active low flying helicopter. To do this we met on site to discuss operating areas and had phone contact on the day to confirm intentions. In the end we deemed it safest to wait until the helicopter had left site before flying our UAV.
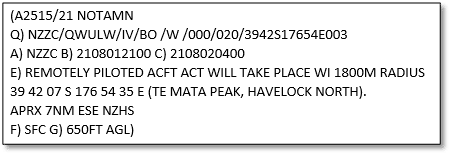
The NOTAM issued for our flight
We split the job into two parts, an oblique survey to map the cliff faces on the southern side of the peak, and a nadir flight to capture the rest of the park. The oblique flights were to be carried out by our DJI Matrice 200, which features a PPK modified X4S 20MP camera and a Klau Geomatic PPK unit allowing us to achieve sub 30mm accuracy. While we were on our initial site visit, we investigated suitable locations to fly from, that would be best for the cliff face part of the survey. Flights were designed around these control locations.
The oblique flights were all manually designed, ensuring that:
- Each leg had the correct overlap with subsequent legs,
- Each leg was close enough to the cliff face to maintain a high resolution, and
- Flight paths were complimentary to the terrain, maintaining a safe distance away from outcrops and valleys.
To check that the UAV was not going to fly into anything, the flight paths were exported as a KML file and bought into Google Earth for a gross check. The flight path is shown in yellow below.

The designed flight path overlaid on Google Terrain
As a secondary check, LiDAR data obtained from the Hawkes Bay Regional Council was also compared to the designed flights. The LiDAR data is significantly denser and has a higher resolution and accuracy than Google terrain data. This comparison was done using Global Mapper.

Checking flight plans against HBRC LiDAR data
The nadir flight was also pre-planned, this time using QBase – the flight control software for the Trinity F90+. During this process, the flight boundary was defined, altitudes and overlaps confirmed, and exclusion zones were implemented to ensure the UAV did not fly over the area where the linesmen were working below, or over unconsented boundaries.
On the day of the survey we had a very early, frosty start to beat the road closure, and also to allow us time to set up the GPS, search for and measure survey control and mark out check points to reference in our aerial survey.

Fortunately, there are two control marks on Te Mata Peak that are accessible above the Peak House. We used Trig No 2 as our base point, with a check to the main trig at the lookout point. As surveyors, accuracy is key to quality work, so we never rely on a single point for observations without checks. Nor do we rely on post-processing a single base station point after the job, as is the process with a lot of ‘out of the box’ solutions. After all, if the survey has no proof of accuracy, how accurate can it really be? This is an issue we see regularly from “man with drone” businesses that offer surveying as a service without understanding what a surveyor does. Without the proper knowledge it can be easy to introduce accuracy errors of up to several metres. But that’s a discussion for another day.

Our old but gold Leica 1200 base station with a snow-capped Ruapehu in the background
With the base station running, and control marks measured and checked, we continued with marking out check points. Our access around the peak was limited due to the road closure, so we placed check points in accessible locations, across varying altitudes, and at the overlap points between the vertical cliff face survey and the nadir survey. We marked out 12 points on the ground, three of which were used as GCPs to marry the nadir and oblique flights together.

Marking survey check points before the flight
The riskiest part of this job was flying the cliff faces, although with all the checks carried out during the planning phase, and the fact we had two people to carry out the job meant the risk of collision with the cliffs was minimised. Before each flight, a pre-flight checklist is carried out, ensuring there are no issues with the UAV, the flight plan, and that all necessary steps and precautions have been considered before the flight.

Our DJI Matrice 200 in action scanning cliff faces
We flew the oblique flights from two different locations. This ensured the UAV didn’t go out of line of sight, and that it remained near enough to see exactly how it was behaving, allowing the operator to make a quick reaction, should something unexpected happen.

Bringing in the Matrice 200 after the final oblique flight
In total we collected just under 2000 images from these three flights, totalling a little over 16GB. Despite the tall cliffs, and the fact we were flying at levels lower than the top off the cliffs (thus blocking views of satellites), our Klau Geomatics PPK GPS unit recorded fixed positions for 100% of the images taken, giving us a dataset accuracy for the oblique survey of +/-17mm Horizontal / +/-29mm Vertical.

Spot the drone!
With the oblique survey successfully completed, it was time to get the big boy out of the box. The Quantum Systems Trinity F90+ is surprisingly a lot easier, simpler and quicker to assemble and prepare for flight than the DJI, despite its larger size. (Note, the following preparation photos are from a different job, we forgot to document this part!)

It doesn’t normally take three people to put this together, but it sure makes the process faster!
Within a few minutes, the Trinity F90+ is assembled and ready for us to work through the pre-flight checklist.

Constructing the Trininity F90+ for flight
The area we were to cover with the fixed wing totalled 190Ha. This was flown at an (average) altitude of 150m AGL giving a total flight time of 1 hour 14 minutes. This was flown with a single (!) battery.

Post flight checks and mission data downloaded
Although we had a NOTAM in place for the flight, we still remained vigilant, monitoring the ADS-B radar, the flight radio and regular visual checks of surrounding airspace.

The Trinity F90+ ready for launch
The on-screen monitoring for the Trinity F90+ is next level. As well as showing the location of the UAV in relation to the planned flight, it is possible to see a range of other critical factors such as ground speed, air speed, estimated windspeed, yaw angle, ESC temperatures, current and planned altitude above ground level, and importantly, a real time location of other aircraft utilising an ADS-B transponder.
In total, for a single flight, we collected just under 1900 images, totalling 50GB.
Unfortunately, part way through the flight a whopping big grey cloud passed, which disappointingly had a visual effect on imagery. While we don’t often pre-process imagery, an attempt was made to brighten these shadows in Adobe Photoshop before processing imagery in Pix4D. The only adjustments made were enhancing the exposure, and a slight change to the white balance. The risk of pre-processing imagery too much is that it alters the image make-up, which can have a negative effect on final dataset accuracy. Minor brightness and WB alterations will have a minimal effect, but changes like sharpening, over saturation or contrast will have a detrimental effect on the accuracy, especially when using a calibrated camera.
Altavian – Does Sharper Drone Imagery Mean Better Data?
With the data downloaded and checked, it was time for processing.
Datasets from each UAV were processed individually using Pix4D Mapper. We had the survey control and check points to act as tie points between both datasets when merging them together for the final result, although the overlap sufficed that we didn’t need to rely on them.
Our new HP Z4 PC had arrived days earlier, so it was a good opportunity to test it out. The specs of this PC are:
- Intel i9-10900k processor @3.7GHz, 10 cores
- 128GB DDR4 2933 RAM
- HP Z Turbo Drive M.2 SSD
- NVidia RTX A5000 24GB GPU
Needless to say, big data is no problem for this machine!
In total the dataset consisted of 3656 images totalling approximately 66GB in size. Point cloud densification took 1h:24m (~ 150million points / 4.6GB – low output setting in Pix4D), and the orthomosaic took 6h:11m to generate.
Accuracy achieved for this dataset were 0.036mN, 0.020mE & 0.028mZ, based on 7 checkpoints.


The desired outcomes of this project were threefold:
- To prove the capability of our new Trinity F90+ UAV
- To digitally recreate the Sleeping Giant – Te Mata, and
- To provide (free of charge) Te Mata Park Trust with updated aerial imagery and terrain data to assist with park planning and maintenance.
The fly-through video of the project is shown below.
If you require large scale or high accuracy aerial mapping, contact us today.